ART-Glove Records Every Touch So Robots Can Learn to Handle Objects Like People Do
Researchers at Carnegie Mellon University built a wearable system that captures both the exact movements of a human hand and the precise locations and forces where it presses against objects. The device, called ART-Glove, or Articulated Tactile Glove, tackles a long-standing gap in robot training. Robots have grown skilled at seeing their surroundings through cameras, yet they still struggle when tasks require careful contact, variable grip force, or coordinated finger adjustments during everyday actions like turning a key or unscrewing a cap.
The majority of current models for collecting demo data result in an uncomfortable trade-off. Teleoperation setups provide robot-ready orders but frequently exclude the natural sensation of a hand, leaving you feeling like you’re in a robot. Pure video recordings keep your hand free, but contact information remains a mystery, inferred at best with limited reliability. Soft sensing gloves provide some pressure data, but their exact shape varies with each wearer, making it difficult to translate it onto a robot hand.
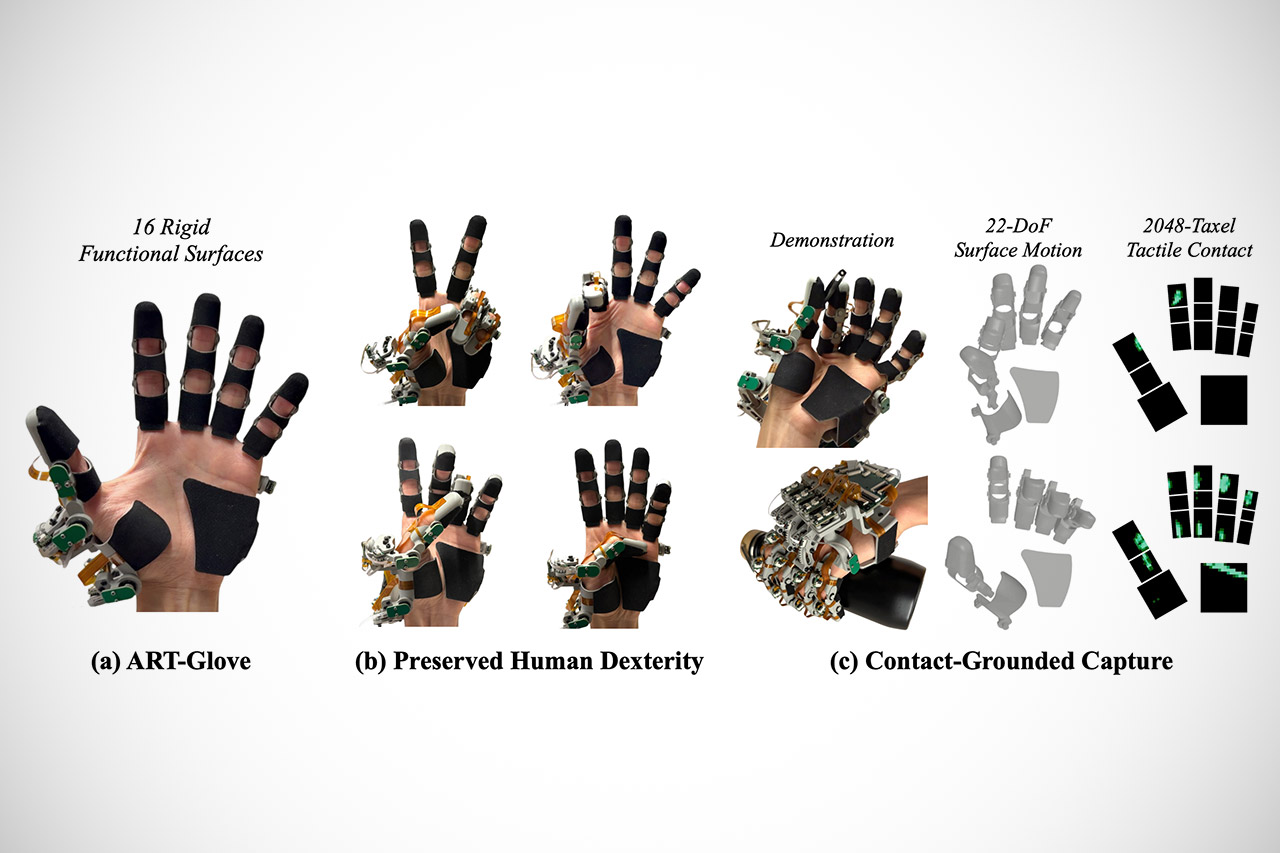
ART-Glove avoids these issues by utilizing a hybrid technique. The primary contact zones on your hand are covered by 16 hard surfaces: three on each finger, three on the thumb, and a broader one across the palm. These pieces provide a recognized geometry on the hand side of things, so any recorded touch contains explicit information about where exactly on the hand the contact occurred and at what angle, among other things. The rigid sections are linked together by 22 joints, all of which are aligned with real human hand anatomy, including multi-axis rotations at the thumb base. They’ve also managed to keep the size down while maintaining natural motion by developing three separate joint systems. Some are rather simple, consisting of shafts and sleeves with gears that transfer to encoders on the back of the hand. Others employ direct bearings or curved slots to provide tighter clearances. All of this is tracked by magnetic rotary encoders, which add no additional friction or wear points.
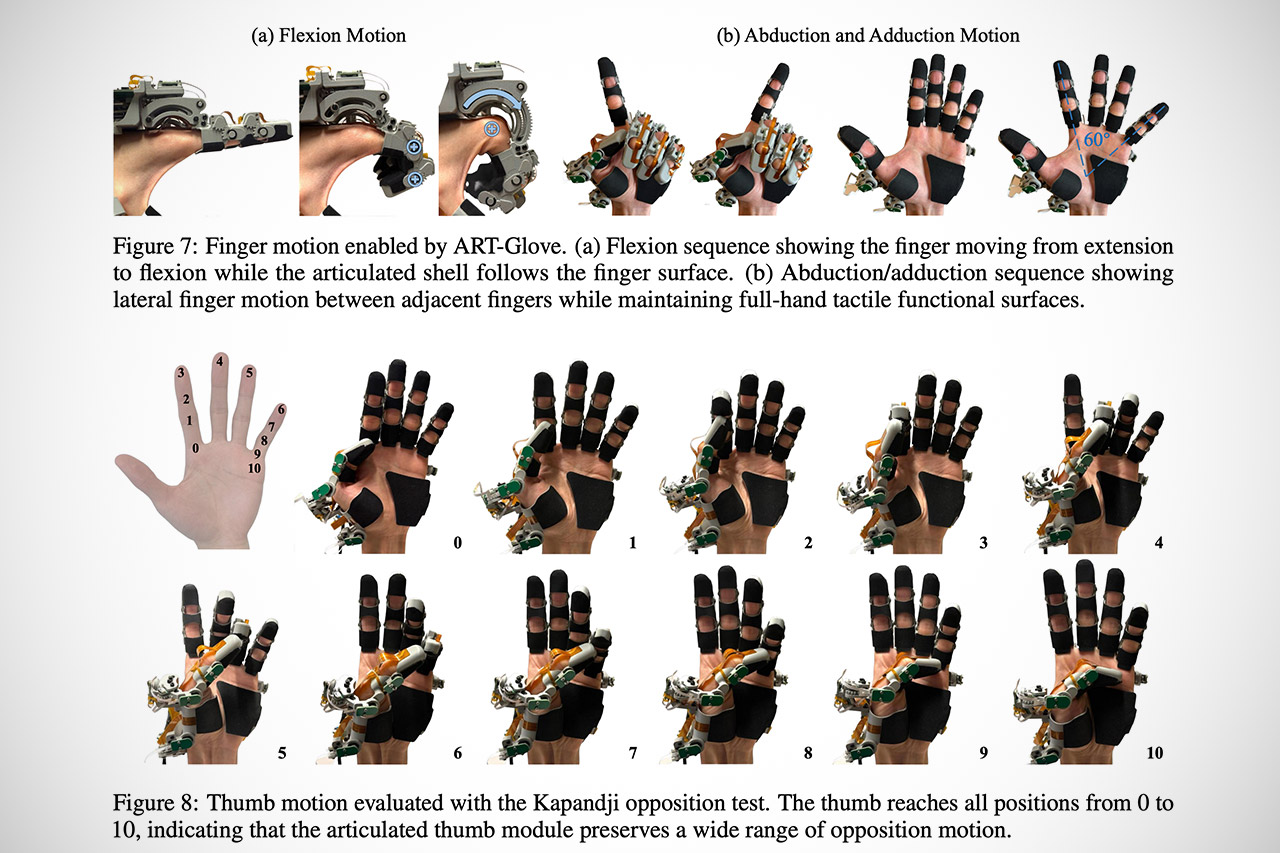
Each hard surface is now covered with a thin piezoresistive layer. Each of these seven flexible circuit modules contains 2048 separate pressure-sensing devices, or taxels, as there is a lot of pressure sensing going on. These sensors monitor real-time force distribution over the hand. On the back of the glove, there’s also a small STM32 microprocessor that reads both the joint encoders and the entire tactile array before synchronizing everything at 120 samples per second. You’ll get a live output stream with 22 degrees of freedom in joint motion, as well as high-resolution pressure maps.
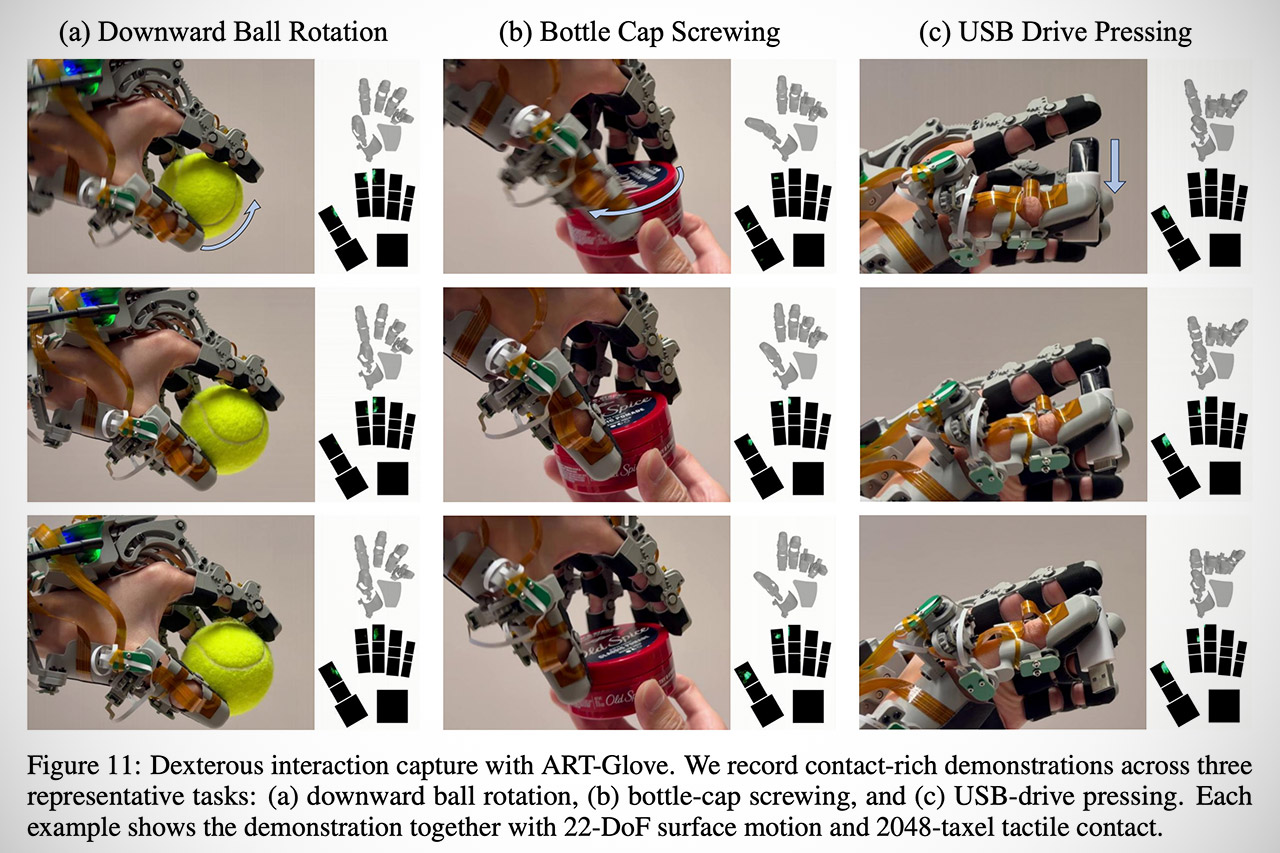
When someone puts on the glove and completes a task, the system records the entire physical story. During a ball rotation exercise, for example, it demonstrates how the contact points vary constantly to keep the force in line with gravity. When someone screws a bottle cap, the pressure patterns begin to move and intensify as the fingers adjust their grip and torque. Pressing a USB drive into a port demonstrates a coordinated multi-finger grab followed by localized pushing force. All of this appears in its own chronology, with a reference to the specific location on the surface where contact occurred.
[Source]
ART-Glove Records Every Touch So Robots Can Learn to Handle Objects Like People Do
#ARTGlove #Records #Touch #Robots #Learn #Handle #Objects #People